Characterization of a Miniaturized IR Depth Sensor With a Programmable Region-of-Interest That Enables Hazard Mapping Applications
Abstract
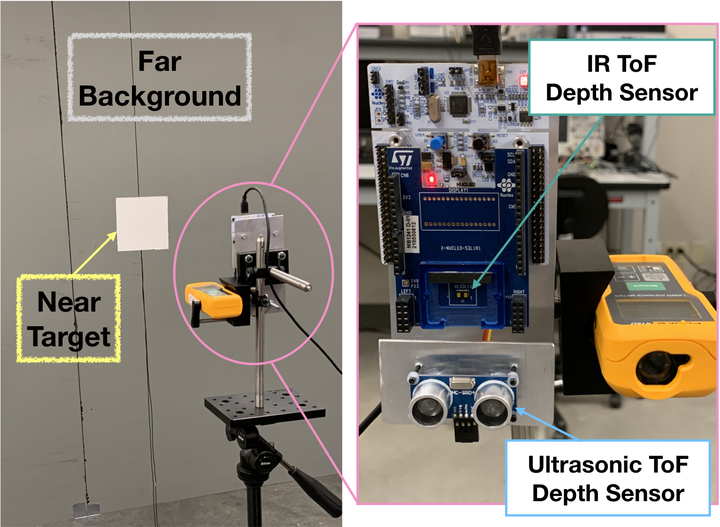
Ultrasonic sensors have dominated miniaturized depth measurement applications such as robot collision avoidance and walking cane hazard detection yet have limited spatial resolution. Optical time-of-flight (ToF) depth sensors offer the potential for improved spatial resolution, however, ToF depth-sensing cameras may be too large and power-hungry for hand-held applications. We address this gap by experimentally evaluating an infrared ToF sensor (the ST VL53L1X) that uses a single-photon avalanche photodiode array to provide coarse spatial resolution while remaining miniaturized and low-power, thus allowing the generation of hazard maps in hand-held applications. We develop methods and present characterization results for distance measurement accuracy, noise, error, and tolerable ambient illumination. The IR ToF sensor sustains accuracy better than 2% up to a distance of 3000mm for a 73% reflective target in the presence of zero interfering ambient light. We characterize the spatial resolution enabled by this region-of-interest and find off-axis pointing of up to 15.7° in steps of 2.5°. Many hazard detection systems may be moving, which dynamically changes the position and pointing of the depth sensor. We demonstrate the use of a 9-degree-of-freedom (3-axis accelerometer, gyroscope, and magnetometer) inertial measurement unit (IMU) to track sensor pointing. The ToF sensor combined with an IMU forms the basis for a miniaturized depth mapping solution that consumes 97.5mW when operating at 30Hz, and requires simple serial interfaces to a microcontroller.